


の動作原理は遊星ローラーねじ対応するモーターがスクリューを回転させ、噛み合うローラーを介してモーターの回転運動がナットの直線往復運動に変換されます。遊星ローラースクリューは螺旋運動と遊星運動を組み合わせ、より高い性能が求められる包括的な状況に非常に適しています。
図は遊星ローラーねじを示しています。主な構成部品は以下のとおりです。
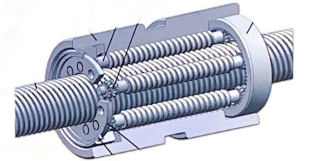
スクリューねじ山の形状は直角三角形(3頭以上のねじ)
ナット内部のねじ山の形状は、ねじの形状と同じです。
ローラー単条ねじの場合、各ローラーの端部には円筒形のピボットが設けられ、バッフルの丸穴にはギアピボットが取り付けられており、ローラーが半径方向に均等に分散されるようにしています。ギアの歯は内輪ギアと噛み合い、ローラーがスムーズに前進できるようにします。
R保持リング、バッフルをロックします。
フラットキー駆動対象物の連結に用いられます。構造がシンプルで、分解・組立が容易で、優れたヘッジ性を有しています。高速、変動荷重、衝撃を受ける状況に適しています。
逆遊星ローラーねじは、逆ローラーねじ、逆遊星ローラーねじとも呼ばれ、ローラーの配置または移動方向が従来の遊星ローラーねじとは逆である直線伝動装置を指します。
逆回転遊星ローラーねじは小型で負荷が大きく、フレームレスモーターを搭載しているため、ヒューマノイドロボットの腕、脚、股関節などに使用できます。
標準型遊星ローラースクリューは、高速性、高い耐荷重性、高精度といった利点を備えています。有効ストロークは1メートル以上に達するため、極めて高荷重の環境にも最適です。
ねじの新しい解放点のためのヒューマノイドロボット。台形ねじとボールねじ機械工作機械分野では成熟した応用が進んでいますが、遊星ローラースクリューは現在、航空宇宙などのハイエンド用途にのみ使用されています。テスラヒューマノイドマシン14のリニアキーには、8~10個のローラースクリューが採用されています。
投稿日時: 2024年12月6日




